






Промышленные роботы
Промышленным роботом можно охарактеризовать систему, которая главным образом состоит из механического исполнительного устройства – манипулятора и устройства управления – программатора. Программируемое устройство управления роботом формирует закон движения манипулятора. Помимо этого, часто используются датчики различного типа, для создания информационно-сенсорной системы.
Применяются промышленные роботы, как правило, в качестве составного элемента для автоматизированных производственных процессов, и служат для перемещения объектов и деталей и для реализации множества технологических операций. Для повышения эффективности, их выгодно использовать вместе с конвейерными линиями и другими средствами автоматизации.
Роботы могут быть различного типа исполнения: стационарные или передвижные. Используемые манипуляторы имеют различное число степеней подвижности.
Разновидности и области применения
В 21 веке, благодаря тому, что промышленные роботы стали активно применяться в производстве, создалось огромное множество их разновидностей, в зависимости от тех или иных сфер применения.
Для общей классификации, можно выделить 3 основных группы, каждая из которых состоит из множества разновидностей:
- автоматические (работа полностью автоматизирована)
- биотехнические (работа автоматизирована наполовину)
- интерактивные (работа в режиме диалога, объединяет автоматизацию и командное управление)
Если говорить про конкретные сферы применения, то можно выделить наиболее распространенные виды промышленных роботов:
- Коллаборативные. Они применяются для безопасного выполнения различных операций совместно с человеком. Применяются для операций, которые невозможно полностью автоматизировать. Для безопасной работы они оснащены датчиками контроля присутствия оператора. В большинстве случаев, имеют интуитивно понятный пользовательский интерфейс для возможности программирования оператором на месте, могут работать от ручного управления оператором.
- Шарнирные. Они обладают универсальным применением благодаря использованию вращательных и кинематических элементов в своих манипуляторах, имеют несколько управляемых осей (в среднем, от 4 до 6). Применяются для операций, связанных с подъемом и перемещением объектов и деталей. Рабочим органом выступает либо захват, либо технологический инструмент.
- Дельтаобразные. Особенностью дельтаобразных роботов является их конструкция с тремя поступательными и одной вращательной степенями свободы, использующая принцип параллелограммов. Это позволяет однозначно определять положение устройства в пространстве, четко отрабатывать заданные движения. Благодаря своей конструкции, подвижные элементы робота обладают малой инерцией, что позволяет развивать высокие ускорения и скорости.
- Для паллетирования. Применяются для снятия объектов с разгрузочных транспортных площадок, стеллажей или конвейеров, и укладки их на паллеты. Движение манипулятора состоит из набора простых повторяющихся действий, поэтому указанные роботы применяются и для разгрузки объектов с паллет. Такие системы, как правило, обладают большой грузоподъемностью, имеют простейшее управление, исключают травмоопасные риски при работе.
- Для дуговой сварки. Процесс дуговой сварки, которая характеризуется нагревом и плавлением металла за счет электрической дуги, может быть выполнен специализированными роботами, которые являются одной из разновидностей шарнирных роботов. В качестве рабочего органа выступает сварочный элемент. Это позволяет автоматизировать сварочный процесс, получить качественные результаты и повысить производительность производства.
- Для верхнего монтажа. Они позволяют осуществлять операции сверху над изделиями и станками, одновременно имея доступ ко всей рабочей площади, на которой установлено оборудование. Такое решение также позволяет сэкономить место в рабочем помещении.
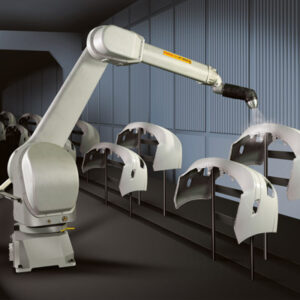
- Покрасочные. Широко используются в различных отраслях промышленности, где требуется нанесение красок и покрытий на поверхности и предметы, в автоматическом режиме. Благодаря автоматизации и высоким характеристикам, достигается однородность покрытия и максимальная скорость. Себестоимость работ при этом снижается.
- SCARA (Selective Compliance Articulated Robot Arm). Особый вид кинематики исполнительных механизмов основан на рычажной системе, в которой используются рычаги и вращающиеся приводы. Вращающиеся приводы располагаются в горизонтальной плоскости для поступательного движения захватного устройства. Широко распространены в сборочных процессах.
Преимущества
Распространение использования промышленных роботов в производстве обусловлено их преимуществами:
- увеличение выпуска готовой продукции
- снижение себестоимости операций
- повышение конкурентоспособности
- уменьшение производственных площадей
- исключение влияния человеческого фактора
- повышение точности
- исключение факторов повышенной опасности для оператора